Project 1
TITLE: AN APPROACH TO TELE-PRESENCE USING MASTER AND SLAVE ROBOTS
Description:
This was my final semester project during my under graduation. Five students(including me) of Electronics and communication engineering are the team members. We completed this project under the esteemed guidance of P.V. Muralidhar, associate professor of ECE department at AITAM. I have already done a couple of robots. So, I was readily chosen as a team-leader.
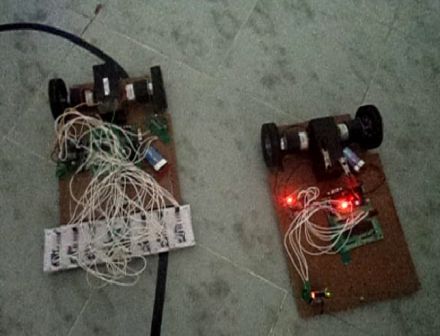
This academic project consists of two robots namely MASTER and SLAVE. Both robots uses PIC18F4520 microcontrollers and XBEE PRO modules to establish UART wireless communication between them.
MASTER bot is an autonomous line-follower with an array of eight black line sensors where as SLAVE bot is a manual bot which is controlled by the MASTER. MASTER robot can sense the line with ease even at high speeds there by following the line very smoothly. The MASTER bot not only follows the line but also transmits its status(speed, position of line between the sensors). This transmitted data is received by the SLAVE as a command and the SLAVE acts similar to the MASTER. The main advantage of this project is that only MASTER bot is having sensors and not the SLAVES. So, at low cost a common task can be accomplish with one MASTER and required number of SLAVES.
As further implementation, I would like to add co ordination between MASTER and SLAVES which gives rise to SWARM INTELLIGENCE.
Results:
This project is done for the fulfillment of Bachelors degree.
The first design of MASTER bot is not up to the mark because the sensors which are used by this bot are sensitive to ambient light. So, its second design, I made a housing for these sensors thereby restricting ambient light from effecting the sensors output. As always the PCB is homemade, it is etched using TONER TRANSFER technique.
References:
Description:
This was my final semester project during my under graduation. Five students(including me) of Electronics and communication engineering are the team members. We completed this project under the esteemed guidance of P.V. Muralidhar, associate professor of ECE department at AITAM. I have already done a couple of robots. So, I was readily chosen as a team-leader.
This academic project consists of two robots namely MASTER and SLAVE. Both robots uses PIC18F4520 microcontrollers and XBEE PRO modules to establish UART wireless communication between them.
MASTER bot is an autonomous line-follower with an array of eight black line sensors where as SLAVE bot is a manual bot which is controlled by the MASTER. MASTER robot can sense the line with ease even at high speeds there by following the line very smoothly. The MASTER bot not only follows the line but also transmits its status(speed, position of line between the sensors). This transmitted data is received by the SLAVE as a command and the SLAVE acts similar to the MASTER. The main advantage of this project is that only MASTER bot is having sensors and not the SLAVES. So, at low cost a common task can be accomplish with one MASTER and required number of SLAVES.
As further implementation, I would like to add co ordination between MASTER and SLAVES which gives rise to SWARM INTELLIGENCE.
Results:
This project is done for the fulfillment of Bachelors degree.
The first design of MASTER bot is not up to the mark because the sensors which are used by this bot are sensitive to ambient light. So, its second design, I made a housing for these sensors thereby restricting ambient light from effecting the sensors output. As always the PCB is homemade, it is etched using TONER TRANSFER technique.
References:
- PIC Robotics - John Iovine
- Autonomous Mobile Robots - Shuzhi Sam Ge Frank L Lewis
- pic microcontroller and embedded systems- Muhammad Ali Mazidi Rolin D. Mckinlay Danny Causey
